一. 热流测量的应用
所谓热流是指从地球内部的热源向地球表层不断扩散的地热能,或通过对流传送,或通过热传导。地热是地球板块构造论中各种多尺度地质活动发生的驱动力。地热同样也可以促进有机质的热降解等化学反应,从而导致碳氢化合物(油和气)的形成。后者体现了其产业价值,而前者的解释更富有科学价值。地球的内部温度随着深度的增大而升高。在地球表面,平均地热梯度相对稳定在平均30℃/千米深。然而,有一些地区这个数值会更高,如沿大洋中脊或地幔热柱附近。尽管被称作热流测量法,热流本身是无法直接测量的。但是,假设热传导是穿过地壳的主要传导过程,很明显,传导热流总是沿着温度降低的方向。通过垂直热梯度和导热系数(傅立叶公式)的结果能够计算出热流的热量。然而,如果涉及到其他传输机制,如流体流动过程热对流,热传输则可能具有非线性热梯度特征,同时,也有可能发生在水平方向上。因此,热流探针系统实际上是一个测量海底沉积物的原位温度梯度和导热系数的仪器,通过这两项参数可以确定热流值(热流密度)。其他热力参数,如沉积物热扩散系数、比热容等也可以推倒出来。这些参数对可应用与如下领域:
油气勘探
热流测量对于石油地质学领域新的油气储源开发具有重大意义,可以在热成熟度计算中为沉积盆地建模提供边界条件。为了确定油气形成的概率,了解潜在源层的热历史非常关键,因为碳水化合物的产生有赖于沉积源岩从沉积开始所处的温度环境。有机物演变成碳水化合物的演变程度可以通过岩层的热成熟度推算出来,但是要有有效的区域地质学概念模式,包括当前热流流量和导热系数分布。
热辐射
日益盛行的海上风能市场最近已打开一个热流测量活动的新领域,尤其导热系数值能够提供有效的信息以估计热能的损耗机制和电缆的环境影响。当电能通过水下电缆从转换平台向海滨传输的时候,部分能量会转换成热量损失掉,从而导致缆线和周围环境温度升高。不考虑电缆本身的特性,决定温度升高多少度的关键因素是周围环境的热特征,特别是沉积物的导热系数、热扩散系数、热容。
天然气水合物
热流测量法也能够进行天然气水合物沉积物稳定性分析。已发现大量天然气水合物在沉积物、深湖沉积物、永久冻土区域中自然产生。潜在甲烷的量非常重要,但同时也受限于自然天然气水合物的沉积,这使得天然气水合物作为潜在能源在未来具备重大利益。天然气水合物的形成是一个放热过程,形成过程总是伴随着热传递,这一现象允许天然气水合物的探测在热流测量的帮助下得以实现。
二. 系统简介
2.1 概述
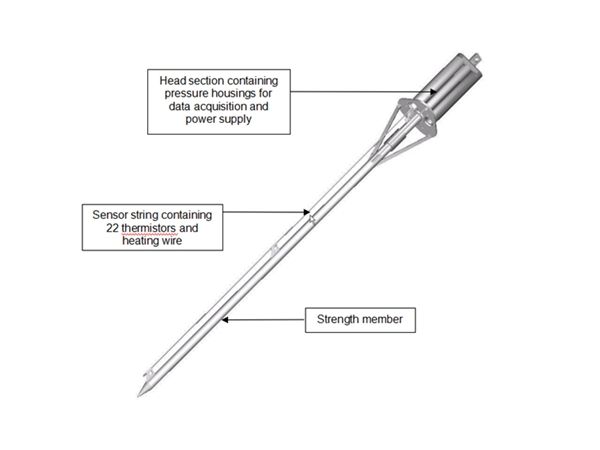
HF-Probe热流探针系统由德国FIELAX公司和不莱梅大学共同研制,用于海底沉积物温度梯度和热导率的原位测量,通过温度梯度和热导率即可得到热流值。作为一款已经投入使用超过十年的发展型产品,全新设计的热流探针可以在10000米水深的海底,原位测量海底沉积物中深达6米的热流值。热流探针的初始型号受限于3米长的工作长度,而海洋科学研究对于诸如2000m以内水深的天然气水合物的兴趣,需要更长的穿透深度,促生了新型热流探针的发展。探针的机械部分设计参考了提琴弓的理念,在尺寸和材料强度上适应所追求的最大穿透深度。最终设计方案参考了阵列尺寸和强度部分的数值模拟。
2.2 系统组成
整个热流探测系统由平台、探杆、数采集存储单元、电池仓、传感器阵列、配重、电脑(预装SDA控制软件、预装数据处理软件)、甲板单元(实时在线测量选配)组成。如下图:


2.2.1 耐压仓
数据采集存储单元及电池均有10000m耐压仓,材质为钛,外径110mm,壁厚10mm,长度为350mm. 下图左边为数据采集存储器,右边为电池仓。

这两个部分都用POM套管固定在平台的金属管中,下图a为数据采集存储单元POM套管,b为电池仓POM套管。

2.2.2 数采集存储单元
数采集存储单元所有暴露在海水中的部分都是用钛和塑料制成的。所有的电子原件都是固定在耐压舱的盖子上。内置锂电池供应数采单元工作。

2.2.2.1 数采集存储单元性能
- 32个测量通道
- 高精度温度传感器PT100
- 超过10000m的水深测量
- 加热脉冲的能量测定
- 电池工作状态的监测
- 双轴倾角测量及垂向加速度测量
- RS232通讯
- 内置3.6V锂电池用于支持数采单元的工作
2.2.2.2 数据采集存储单元的接口和传感器

上图左边是数据采集存储单元的底部,三个接口用于连接传感器阵列。右图为数据采集存储单元的顶部,分别为a)PT100温度传感器 b) 压力传感器 c)工作状态指示灯d)电池仓连接接口 e)通讯电缆接口。
2.2.3 电池仓
电池仓中装有可充电的26.2V的NiMH电池包,电池仓为系统的加热周期的工作提供能源。电池仓顶部有与数采单元连接接口。

2.2.4 传感器阵列
传感器阵列金属部分长6m,直径15mm,内部等距离分布着22个热敏电阻温度传感器(命名NTC1 – NTC22)、电阻丝以及电缆;金属部分材质为不锈钢,尾端用高强度塑料封装电缆接头,三根带水密接头的电缆用于连接数据采集存储单元。工作时等距(650px)测量沉积物的温度,从而得出温度梯度,加热周期时通过传感器阵列内的电阻丝给沉积物加热,然后测量沉积物加热后温度降低过程的温度来得出热导系数。

技术指标如下:
测量范围:-2℃至60℃
分辨率小于1mK(-2℃至30℃)
绝对精度±2mK
采样频率1Hz
控制高能量热脉冲(约270w)进行原位热导率的测量。
2.2.5 技术指标
物理指标:
总长 7.85m;重量:950Kg;外加配重:最多可加3000Kg
电池监测:
NiMH电池(电池仓) 内置锂电池
量程 0…27 VDC 0…5 VDC
分辨率 1 mV 1 mV
精度 10 mV 10 mV
电脉冲(加热周期):
持续时间 软件设置(一般20s)
电流 量程0-22 A 精度10 mA
电压 量程0-25 VDC 精度10 mV
能量:0-500W
温度传感器:
a) PT100 (数据采集存储单元上)
长度 90mm
量程 -2~36°C
分辨率 0.5mk
精度 <5mk
响应时间 150ms
b) 热敏电阻(传感器阵列上)
量程 -2~60°C
分辨率 0.5 mK
精度 原位校准后达±2mK
压力传感器:
量程 0-10000m
精度 0.1%FS
双轴(X,Y)倾角传感器:
量程 -15°~15°
分辨率 0.02°
稳定性 0.1°
输出 sinX,sinY
零点 垂直方向
垂向(Z)加速度传感器:
量程 - g~g
分辨率 0.001 g
稳定性 0.01 g
输出 关于g的曲线
三. 工作流程
3.1 装配
系统的装配需要足够的空间及硬质地面,探杆和平台必须放在可移动的小推车上。

3.1.1 平台和探杆
移动小推车将平台和探杆接口处对接,移动管接头套住连接处,并上好螺栓,然后上好3个辅助固条。

3.1.2 传感器阵列
将传感器阵列通过平台上的金属管穿入分别位于平台和探杆上的固定点,然后用螺丝固定。见下图

3.1.3 数据采集存储单元和电池仓的安装
数据采集存储单元和电池仓都安装在平台的金属管中,用POM套管来固定。见下图

将POM套管套在数据采集存储器上后将传感器阵列的三个水密接口同色(分别是红,蓝,黑)插入数据采集存储器底部的接口,然后将推入金属管,电池仓套上POM套管后直接推入另一个金属管。用螺丝将套管固定在金属管中。套管位置及螺丝位置见下图

然后将电池仓和数采单元用电缆连接,数采连接电脑设置好后,盖上顶盖。根据需求安装配重,配重用螺栓固定在平台底座上。见下图。

3.2 参数设置
将数采和电脑连接后,可通过SDA软件设置系统工作的参数。一个控制文件中包好三个重要的因子A1,A2,A3.
A1:给出一个深度的阀值,下放过程中系统在A1上方时处于待机状态,系统越过A1规定的深度后,系统开始工作同时开始检测A2的条件。
A2:根据一系列的参数给出,只有当所有的参数都达到设置的稳定时间<合理的稳定时间是7分钟>,系统才会进行加热工作,下面参数会被检测。
--倾角限制(X,Y)
--倾角稳定(X,Y的波动)
--贯入深度(选配高度计的话需要这项)
--位置稳定(垂直加速度)
A3: 给出一个深度的阀值,当系统完成一个点位的工作后,需要被提升到这个阀值以上,来激活下一个测量周期。
软件界面如下图:

3.3 系统的工作
3.3.1 布放以及回收
我公司会根据船的甲板空间以及起重的状况来给出布放以及回收的方案。
下面展示一些案例




操作注意事项
--离海底100m-50m范围内以1.2m/的速度下放
--在50m出要悬停,等待钢缆竖直(最少3分钟)
--贯入沉积物,贯入速度取决于底质和配重,在底质较软时,系统无需配重能以大约1m/s的速度至全部贯入
--注意绞车的张力计,在系统接触海底时能从张力的变小来判断,大概10s钟系统能完全贯入,系统在沉积物中工作时,适当多放一点钢缆,防止船的漂移对系统产生影响
--工作完成后,以大约0.3m/s的速度将系统拉出沉积物,这时绞车的张力增大,大约20s后,系统完全离开沉积物,然后以1m/s的速度提升系统。
-- 将系统提到安全高度,然后拖着设备到下一站位,移动过程中全程监测水深,到下一个站位后,等待钢缆竖直,然后将系统提升超过A3设定的值后,进行第二次贯入工作。
--全部工作结束后,将系统回收到甲板,进行数据的下载。
3.3.2 水下工作过程
下图显示系统三个站位的工作流程,以及整个过程中A1,A2,A3的关系

下图展示从悬停到拔出整个观测的流程

A.悬停在沉积物上方 B.贯入沉积物
C.测量贯入摩擦产生的热量耗散(约7-12分钟) D.加热过程(20秒)
E.测量加热后热量耗散(约15-20分钟) F.拔出
3.3.3 数据及数据处理
系统提供的原始数据如下:

Vbatt 内置锂电池电压 NTC01-NTC22 22个热敏电阻温度传感器测的温度
Press 压力(单位dbar) Vaccu 电池仓的电池的电压
Temp PT100所测的温度 TiltX,Y 倾角
Vheat 加热时的电压 AccZ 垂直加速度
Iheat 加热时的电流
下图显示整个过程的温度、倾角,加速度以及压力(水深)

从左往右,加速度为O的时间段是系统悬停,紧接着后面是贯入时间,完全贯入后,加速度为零,然后测量摩擦生热耗散、加热、加热耗散最后拔出并回收。
系统记录温度做时间的函数。一个完整的测量周期从贯入过程开始。系统被下放到海底,贯入沉积物层,由于摩擦产热的原因温度骤升。随着摩擦热和后续衰变,相应的沉积物温度关于深度的函数关系便派生出来。经过一定的稳定时间之后,发射一个热脉冲,加热传感器阵列和周围的沉积物。系统仍保留在沉积物中测量热量的衰减,以确定随深度所决定的沉积物导热系数和热扩散率。

上图显示整个过程温度随时间变化。绿色为最上面的传感器,红色为最下面的传感器。(整个过程的动态图见动态PPT)
数据的处理通过GHF / T2C软件来进行,该软件基于Matlab.见下图

热流计算的原理:
沉积物的温度为T(z),其中z为沉积物的深度,则温度梯度为dT/dz
导热系数为λ(z), κ(z)为温度的分子扩散系数 则比热容ρc=λ/ κ,物理意义为一立方米的物质温度升高1度所需要的热量,即物质抓取热流的能力。
热流q则可通过傅立叶定律算得:q=λ(z) ·
相关案例:

温度随时间的变化

纵坐标都是沉积物的深度,横坐标从做往右分别是温度,导热系数(λ),分子扩散系数(κ),比热容(ρc)

上图所示为横跨天然气水合物储源的温度剖面图。剖面图中Pen 3和Pen 4表现出相对线性深度的强烈偏离,此偏离可以说明有强烈的对流过程存在,表示有游离气体的存在。
四. 系统保养维护
系统不需要特别的维护保养,但是鉴于在海中使用,为确保系统的性能,以下几个方面需要注意:
--每次回收后,需要用淡水冲洗干净,检查系统是否有损伤,特别是电缆、水密接口以及传感器阵列。<传感器阵列有轻微磨损属正常情况,故大量作业时需要配置几个传感器阵列备用>
--将数据采集存储单元和电池仓从平台上取下后,检查螺丝是否松动
--长期存储前,需要给金属部件特别是紧固用的螺栓等抹上黄油等防锈剂
--清洁传感器阵列,在储存前也需要抹上黄油等防锈剂
--在新一次使用系统前,注意检查装配用的手推车的功能,滑轮、千斤顶。确保手推车功能正常。
一. 热流测量的应用
所谓热流是指从地球内部的热源向地球表层不断扩散的地热能,或通过对流传送,或通过热传导。地热是地球板块构造论中各种多尺度地质活动发生的驱动力。地热同样也可以促进有机质的热降解等化学反应,从而导致碳氢化合物(油和气)的形成。后者体现了其产业价值,而前者的解释更富有科学价值。地球的内部温度随着深度的增大而升高。在地球表面,平均地热梯度相对稳定在平均30℃/千米深。然而,有一些地区这个数值会更高,如沿大洋中脊或地幔热柱附近。尽管被称作热流测量法,热流本身是无法直接测量的。但是,假设热传导是穿过地壳的主要传导过程,很明显,传导热流总是沿着温度降低的方向。通过垂直热梯度和导热系数(傅立叶公式)的结果能够计算出热流的热量。然而,如果涉及到其他传输机制,如流体流动过程热对流,热传输则可能具有非线性热梯度特征,同时,也有可能发生在水平方向上。因此,热流探针系统实际上是一个测量海底沉积物的原位温度梯度和导热系数的仪器,通过这两项参数可以确定热流值(热流密度)。其他热力参数,如沉积物热扩散系数、比热容等也可以推倒出来。这些参数对可应用与如下领域:
油气勘探
热流测量对于石油地质学领域新的油气储源开发具有重大意义,可以在热成熟度计算中为沉积盆地建模提供边界条件。为了确定油气形成的概率,了解潜在源层的热历史非常关键,因为碳水化合物的产生有赖于沉积源岩从沉积开始所处的温度环境。有机物演变成碳水化合物的演变程度可以通过岩层的热成熟度推算出来,但是要有有效的区域地质学概念模式,包括当前热流流量和导热系数分布。
热辐射
日益盛行的海上风能市场最近已打开一个热流测量活动的新领域,尤其导热系数值能够提供有效的信息以估计热能的损耗机制和电缆的环境影响。当电能通过水下电缆从转换平台向海滨传输的时候,部分能量会转换成热量损失掉,从而导致缆线和周围环境温度升高。不考虑电缆本身的特性,决定温度升高多少度的关键因素是周围环境的热特征,特别是沉积物的导热系数、热扩散系数、热容。
天然气水合物
热流测量法也能够进行天然气水合物沉积物稳定性分析。已发现大量天然气水合物在沉积物、深湖沉积物、永久冻土区域中自然产生。潜在甲烷的量非常重要,但同时也受限于自然天然气水合物的沉积,这使得天然气水合物作为潜在能源在未来具备重大利益。天然气水合物的形成是一个放热过程,形成过程总是伴随着热传递,这一现象允许天然气水合物的探测在热流测量的帮助下得以实现。
二. 系统简介
2.1 概述
HF-Probe热流探针系统由德国FIELAX公司和不莱梅大学共同研制,用于海底沉积物温度梯度和热导率的原位测量,通过温度梯度和热导率即可得到热流值。作为一款已经投入使用超过十年的发展型产品,全新设计的热流探针可以在10000米水深的海底,原位测量海底沉积物中深达6米的热流值。热流探针的初始型号受限于3米长的工作长度,而海洋科学研究对于诸如2000m以内水深的天然气水合物的兴趣,需要更长的穿透深度,促生了新型热流探针的发展。探针的机械部分设计参考了提琴弓的理念,在尺寸和材料强度上适应所追求的最大穿透深度。最终设计方案参考了阵列尺寸和强度部分的数值模拟。
2.2 系统组成
整个热流探测系统由平台、探杆、数采集存储单元、电池仓、传感器阵列、配重、电脑(预装SDA控制软件、预装数据处理软件)、甲板单元(实时在线测量选配)组成。如下图:
2.2.1 耐压仓
数据采集存储单元及电池均有10000m耐压仓,材质为钛,外径110mm,壁厚10mm,长度为350mm. 下图左边为数据采集存储器,右边为电池仓。
这两个部分都用POM套管固定在平台的金属管中,下图a为数据采集存储单元POM套管,b为电池仓POM套管。
2.2.2 数采集存储单元
数采集存储单元所有暴露在海水中的部分都是用钛和塑料制成的。所有的电子原件都是固定在耐压舱的盖子上。内置锂电池供应数采单元工作。
2.2.2.1 数采集存储单元性能
- 32个测量通道
- 高精度温度传感器PT100
- 超过10000m的水深测量
- 加热脉冲的能量测定
- 电池工作状态的监测
- 双轴倾角测量及垂向加速度测量
- RS232通讯
- 内置3.6V锂电池用于支持数采单元的工作
2.2.2.2 数据采集存储单元的接口和传感器
上图左边是数据采集存储单元的底部,三个接口用于连接传感器阵列。右图为数据采集存储单元的顶部,分别为a)PT100温度传感器 b) 压力传感器 c)工作状态指示灯d)电池仓连接接口 e)通讯电缆接口。
2.2.3 电池仓
电池仓中装有可充电的26.2V的NiMH电池包,电池仓为系统的加热周期的工作提供能源。电池仓顶部有与数采单元连接接口。
2.2.4 传感器阵列
传感器阵列金属部分长6m,直径15mm,内部等距离分布着22个热敏电阻温度传感器(命名NTC1 – NTC22)、电阻丝以及电缆;金属部分材质为不锈钢,尾端用高强度塑料封装电缆接头,三根带水密接头的电缆用于连接数据采集存储单元。工作时等距(650px)测量沉积物的温度,从而得出温度梯度,加热周期时通过传感器阵列内的电阻丝给沉积物加热,然后测量沉积物加热后温度降低过程的温度来得出热导系数。
技术指标如下:
测量范围:-2℃至60℃
分辨率小于1mK(-2℃至30℃)
绝对精度±2mK
采样频率1Hz
控制高能量热脉冲(约270w)进行原位热导率的测量。
2.2.5 技术指标
物理指标:
总长 7.85m;重量:950Kg;外加配重:最多可加3000Kg
电池监测:
NiMH电池(电池仓) 内置锂电池
量程 0…27 VDC 0…5 VDC
分辨率 1 mV 1 mV
精度 10 mV 10 mV
电脉冲(加热周期):
持续时间 软件设置(一般20s)
电流 量程0-22 A 精度10 mA
电压 量程0-25 VDC 精度10 mV
能量:0-500W
温度传感器:
a) PT100 (数据采集存储单元上)
长度 90mm
量程 -2~36°C
分辨率 0.5mk
精度 <5mk
响应时间 150ms
b) 热敏电阻(传感器阵列上)
量程 -2~60°C
分辨率 0.5 mK
精度 原位校准后达±2mK
压力传感器:
量程 0-10000m
精度 0.1%FS
双轴(X,Y)倾角传感器:
量程 -15°~15°
分辨率 0.02°
稳定性 0.1°
输出 sinX,sinY
零点 垂直方向
垂向(Z)加速度传感器:
量程 - g~g
分辨率 0.001 g
稳定性 0.01 g
输出 关于g的曲线
三. 工作流程
3.1 装配
系统的装配需要足够的空间及硬质地面,探杆和平台必须放在可移动的小推车上。
3.1.1 平台和探杆
移动小推车将平台和探杆接口处对接,移动管接头套住连接处,并上好螺栓,然后上好3个辅助固条。
3.1.2 传感器阵列
将传感器阵列通过平台上的金属管穿入分别位于平台和探杆上的固定点,然后用螺丝固定。见下图
3.1.3 数据采集存储单元和电池仓的安装
数据采集存储单元和电池仓都安装在平台的金属管中,用POM套管来固定。见下图
将POM套管套在数据采集存储器上后将传感器阵列的三个水密接口同色(分别是红,蓝,黑)插入数据采集存储器底部的接口,然后将推入金属管,电池仓套上POM套管后直接推入另一个金属管。用螺丝将套管固定在金属管中。套管位置及螺丝位置见下图
然后将电池仓和数采单元用电缆连接,数采连接电脑设置好后,盖上顶盖。根据需求安装配重,配重用螺栓固定在平台底座上。见下图。
3.2 参数设置
将数采和电脑连接后,可通过SDA软件设置系统工作的参数。一个控制文件中包好三个重要的因子A1,A2,A3.
A1:给出一个深度的阀值,下放过程中系统在A1上方时处于待机状态,系统越过A1规定的深度后,系统开始工作同时开始检测A2的条件。
A2:根据一系列的参数给出,只有当所有的参数都达到设置的稳定时间<合理的稳定时间是7分钟>,系统才会进行加热工作,下面参数会被检测。
--倾角限制(X,Y)
--倾角稳定(X,Y的波动)
--贯入深度(选配高度计的话需要这项)
--位置稳定(垂直加速度)
A3: 给出一个深度的阀值,当系统完成一个点位的工作后,需要被提升到这个阀值以上,来激活下一个测量周期。
软件界面如下图:
3.3 系统的工作
3.3.1 布放以及回收
我公司会根据船的甲板空间以及起重的状况来给出布放以及回收的方案。
下面展示一些案例
操作注意事项
--离海底100m-50m范围内以1.2m/的速度下放
--在50m出要悬停,等待钢缆竖直(最少3分钟)
--贯入沉积物,贯入速度取决于底质和配重,在底质较软时,系统无需配重能以大约1m/s的速度至全部贯入
--注意绞车的张力计,在系统接触海底时能从张力的变小来判断,大概10s钟系统能完全贯入,系统在沉积物中工作时,适当多放一点钢缆,防止船的漂移对系统产生影响
--工作完成后,以大约0.3m/s的速度将系统拉出沉积物,这时绞车的张力增大,大约20s后,系统完全离开沉积物,然后以1m/s的速度提升系统。
-- 将系统提到安全高度,然后拖着设备到下一站位,移动过程中全程监测水深,到下一个站位后,等待钢缆竖直,然后将系统提升超过A3设定的值后,进行第二次贯入工作。
--全部工作结束后,将系统回收到甲板,进行数据的下载。
3.3.2 水下工作过程
下图显示系统三个站位的工作流程,以及整个过程中A1,A2,A3的关系
下图展示从悬停到拔出整个观测的流程
A.悬停在沉积物上方 B.贯入沉积物
C.测量贯入摩擦产生的热量耗散(约7-12分钟) D.加热过程(20秒)
E.测量加热后热量耗散(约15-20分钟) F.拔出
3.3.3 数据及数据处理
系统提供的原始数据如下:
Vbatt 内置锂电池电压 NTC01-NTC22 22个热敏电阻温度传感器测的温度
Press 压力(单位dbar) Vaccu 电池仓的电池的电压
Temp PT100所测的温度 TiltX,Y 倾角
Vheat 加热时的电压 AccZ 垂直加速度
Iheat 加热时的电流
下图显示整个过程的温度、倾角,加速度以及压力(水深)
从左往右,加速度为O的时间段是系统悬停,紧接着后面是贯入时间,完全贯入后,加速度为零,然后测量摩擦生热耗散、加热、加热耗散最后拔出并回收。
系统记录温度做时间的函数。一个完整的测量周期从贯入过程开始。系统被下放到海底,贯入沉积物层,由于摩擦产热的原因温度骤升。随着摩擦热和后续衰变,相应的沉积物温度关于深度的函数关系便派生出来。经过一定的稳定时间之后,发射一个热脉冲,加热传感器阵列和周围的沉积物。系统仍保留在沉积物中测量热量的衰减,以确定随深度所决定的沉积物导热系数和热扩散率。
上图显示整个过程温度随时间变化。绿色为最上面的传感器,红色为最下面的传感器。(整个过程的动态图见动态PPT)
数据的处理通过GHF / T2C软件来进行,该软件基于Matlab.见下图
热流计算的原理:
沉积物的温度为T(z),其中z为沉积物的深度,则温度梯度为dT/dz
导热系数为λ(z), κ(z)为温度的分子扩散系数 则比热容ρc=λ/ κ,物理意义为一立方米的物质温度升高1度所需要的热量,即物质抓取热流的能力。
热流q则可通过傅立叶定律算得:q=λ(z) ·
相关案例:
温度随时间的变化
纵坐标都是沉积物的深度,横坐标从做往右分别是温度,导热系数(λ),分子扩散系数(κ),比热容(ρc)
上图所示为横跨天然气水合物储源的温度剖面图。剖面图中Pen 3和Pen 4表现出相对线性深度的强烈偏离,此偏离可以说明有强烈的对流过程存在,表示有游离气体的存在。
四. 系统保养维护
系统不需要特别的维护保养,但是鉴于在海中使用,为确保系统的性能,以下几个方面需要注意:
--每次回收后,需要用淡水冲洗干净,检查系统是否有损伤,特别是电缆、水密接口以及传感器阵列。<传感器阵列有轻微磨损属正常情况,故大量作业时需要配置几个传感器阵列备用>
--将数据采集存储单元和电池仓从平台上取下后,检查螺丝是否松动
--长期存储前,需要给金属部件特别是紧固用的螺栓等抹上黄油等防锈剂
--清洁传感器阵列,在储存前也需要抹上黄油等防锈剂
--在新一次使用系统前,注意检查装配用的手推车的功能,滑轮、千斤顶。确保手推车功能正常。