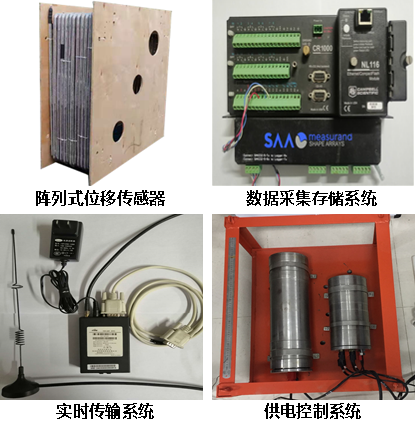
海底变形滑动原位观测装置由变形传感系统、数据采集系统、无线传输系统和供电系统组成,能够长期实时自动同步观测记录近海或深海海底侧向蠕滑变形、海床面的坍塌隆起、大位移尺度的滑坡等海床变形现象,并能实现海底变形监测数据的实时传输和观测的远程监控,建立起海底变形滑移灾害预警机制模型。
变形滑动观测主要应用阵列式位移完成,其既可垂直安装在海床中以监测海床侧向变形滑动,也可水平安装在海床表面以监测塌陷或者隆起变形。通过外连通讯浮球,可实现原位监测数据的实时传输和采集模式的远程控制。因此,可根据海况条件切换采集频率,在保证数据量的前提下延长监测周期。本观测装置及应用技术旨在可靠地记录海底变形事件及演化过程,具有功耗低可长期观测、传感器精度高且稳定、设备可重复使用等特点。
海底变形滑动原位观测装置,性能指标如下:
序号 | 指标名称 | 参数 | 序号 | 指标名称 | 参数 |
1 | 测量精度 | 0.5mm/32m | 4 | 工作温度 | -25-50℃ |
2 | 分辨率 | 0.01mm | 5 | 通讯接口 | RS485或232 |
3 | 防水保证 | 200m | 6 | 供电要求 | 9.6~16VDc |
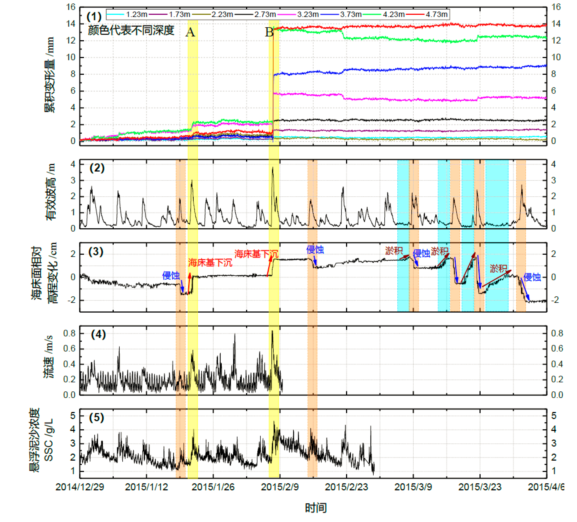
下图为海底变形滑动原位观测装置在黄河水下三角洲埕岛海域时长4个月的原位观测数据。图中显示整个观测周期发生了多次海床变形,且与风暴的对应关系良好,波浪为海底变形的主导因素。其中2015年1月21日(事件A)、2015年2月7日(事件B)发生了两次最为明显的变形过程,当天所对应的最大有效波高值是整个观测周期中最大的两天。其中风暴事件B期间,沉积物发生了的变形位移量最大,阵列式位移传感器最后一段(埋深1.23 m)的累积计位移量为13 mm,在13:30-14:00期间发生了8 mm位移量。
海底变形滑动原位观测装置由变形传感系统、数据采集系统、无线传输系统和供电系统组成,能够长期实时自动同步观测记录近海或深海海底侧向蠕滑变形、海床面的坍塌隆起、大位移尺度的滑坡等海床变形现象,并能实现海底变形监测数据的实时传输和观测的远程监控,建立起海底变形滑移灾害预警机制模型。
变形滑动观测主要应用阵列式位移完成,其既可垂直安装在海床中以监测海床侧向变形滑动,也可水平安装在海床表面以监测塌陷或者隆起变形。通过外连通讯浮球,可实现原位监测数据的实时传输和采集模式的远程控制。因此,可根据海况条件切换采集频率,在保证数据量的前提下延长监测周期。本观测装置及应用技术旨在可靠地记录海底变形事件及演化过程,具有功耗低可长期观测、传感器精度高且稳定、设备可重复使用等特点。
海底变形滑动原位观测装置,性能指标如下:
序号 | 指标名称 | 参数 | 序号 | 指标名称 | 参数 |
1 | 测量精度 | 0.5mm/32m | 4 | 工作温度 | -25-50℃ |
2 | 分辨率 | 0.01mm | 5 | 通讯接口 | RS485或232 |
3 | 防水保证 | 200m | 6 | 供电要求 | 9.6~16VDc |
下图为海底变形滑动原位观测装置在黄河水下三角洲埕岛海域时长4个月的原位观测数据。图中显示整个观测周期发生了多次海床变形,且与风暴的对应关系良好,波浪为海底变形的主导因素。其中2015年1月21日(事件A)、2015年2月7日(事件B)发生了两次最为明显的变形过程,当天所对应的最大有效波高值是整个观测周期中最大的两天。其中风暴事件B期间,沉积物发生了的变形位移量最大,阵列式位移传感器最后一段(埋深1.23 m)的累积计位移量为13 mm,在13:30-14:00期间发生了8 mm位移量。